

This website uses cookies so that we can provide you with the best user experience possible. Cookie information is stored in your browser and performs functions such as recognising you when you return to our website and helping our team to understand which sections of the website you find most interesting and useful.
Drone Autopilot
Consumer electronics
Drone
Embedded hardware development
Firmware development
Robotics
Today, you can buy drones in all kinds of shapes and sizes. The market offers ready-to-use drones with GPS, autopilot, and camera. However, when commercial drones weren't in great demand, there were lots of amateurs who constructed their drones from scratch.
One e-commerce store was selling components for do-it-yourself unmanned aircraft. Because there were many competing stores of the same kind on the market, it was hard to offer a competitive advantage. The owner of this particular store decided to build a ready-to-market product whose target audience would be people without skills in aeromodelling.
Request
Integra Sources was hired to develop an autopilot system that could enable a drone to fly autonomously and could be used with any type of drones, from quadcopters to fixed-wing systems.
Solution
We designed a circuit board based on the Atmel AVR XMEGA microcontroller, which was much smaller than the other analogs in existence at that time. Despite its size, we managed to pack in everything you need for an autopilot system including a gyroscope, accelerometer, pressure sensor, GPS, and a barometer.
The device we designed runs ported and customized ArduPilot firmware written in C/C++ (AVR Studio IDE). The firmware works with a native host PC application called MissionPlanner. It's a great tool for setting up drones and planning flight missions.

Scope of work
- Schematics design
- PCB design
- Generation files for the manufacturer
- Ordering the components and PCB manufacturing
- Prototyping assembly
- Hardware testing
- Debugging
- Firmware development
Technologies Used
- ATXmega series MCU with AVR core was used for this project.
- Altium Designer IDE was used for Schematics and PCB design.
- The firmware was implemented using C/C++.
- AVR Studio IDE was used for firmware implementation.
- For precision positioning GPS, accelerometer, gyroscope, barometer, and DCM (Direction cosine matrix) based algorithms are used.
- The device has 6 RC inputs for remote control equipment like RC radio receivers, and 6 RC outputs to control motor controllers, servos, etc.
- The device has several buttons, switches, and LEDs.
Result
The device we delivered is an autopilot system for a drone that controls all peripherals, actuators, and motors. It enables remote control and autonomous completion of flights. It is a great choice for people who prefer to buy ready-to-use quadcopters rather than building DIY drones from scratch.

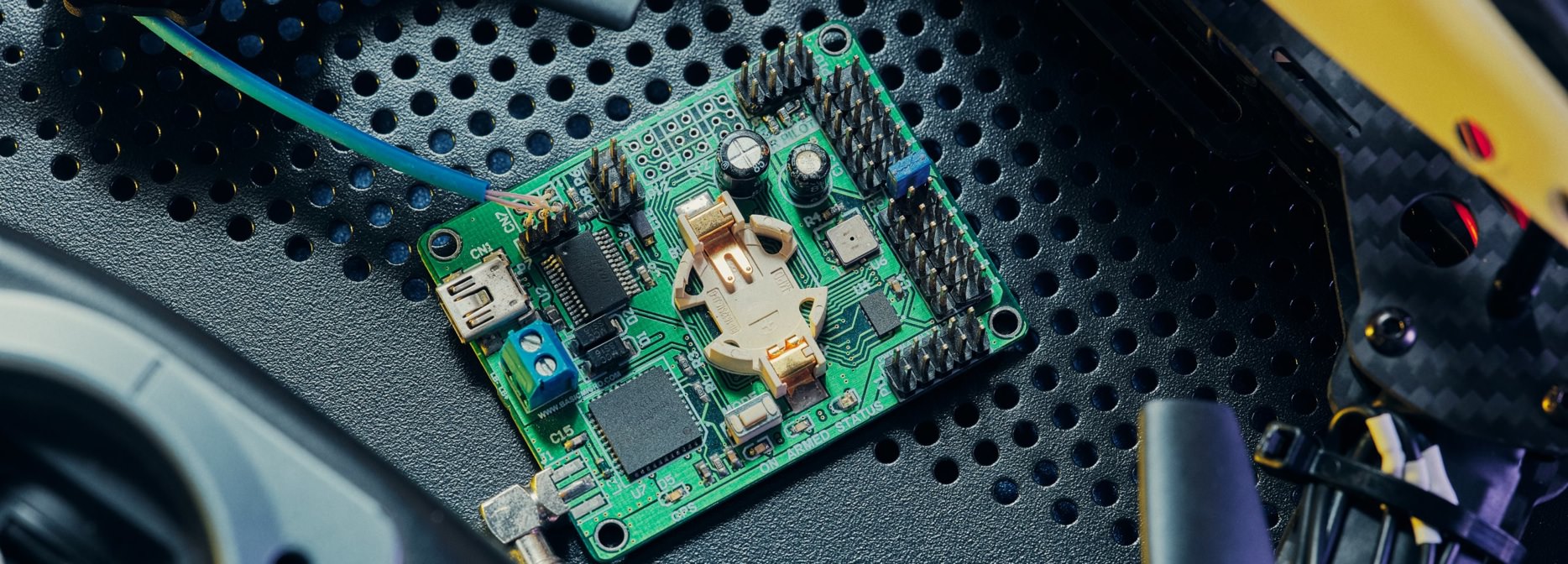
Device appearance
The circuit board for the Drone Autopilot has a three-axis accelerometer, a three-axis gyroscope, a pressure sensor, and GPS on board. It has up to six radio control inputs to receive control from the radio control receiver and up to six radio control outputs to control motors and/or servos. The board has four external serial interfaces to connect extra modules.
You might also like...

A Ready-To-Fly Quadcopter
The quadcopter is 10x10 centimeters in size. It can be controlled over a Sony PlayStation 2 gamepad or any other compatible wireless gamepad. ![]()
LEARN MORE ![]()

Autonomous Robotic Lawn Mower
The robot has an autonomous navigation system with sensors and intelligent algorithms. We provided both hardware design to software development. ![]()
LEARN MORE ![]()